
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Les liaisons de communication UAV interfèrent avec les bandes de fréquences micro-ondes
Contrairement au radar, qui détecte les cibles, le but d'un système de communication est de transmettre des informations d'un endroit à un autre. Par conséquent, les interférences avec les systèmes de communication sont différentes des interférences avec les systèmes radar. Un scénario d'interférence de communication simple est illustré ci-dessous :

Où, la puissance S du signal utile reçu par le récepteur = ERps-LS +Gr, où ERPs est la puissance rayonnée équivalente (dBm) de l'émetteur du signal utile dans la direction du récepteur, Ls est la perte de liaison (dB), et Gr est le gain (dB) de l'antenne de réception dans la direction de l'émetteur du signal utile.
L'objet de brouillage du brouilleur est le récepteur cible, pas l'émetteur, ce qui est différent du brouillage du système radar, car généralement l'émetteur du radar se trouve au même endroit que le récepteur.
Si des interférences avec des liaisons de véhicules aériens sans pilote (UAV) sont envisagées, l'objet de brouillage doit être pris en compte. Le drone dispose d'une liaison de contrôle de la station de contrôle vers le drone, également appelée liaison montante ; Il dispose également d'une liaison de données du drone à la station de contrôle, également appelée liaison descendante.
Interférence sur la liaison de contrôle
La liaison de contrôle est une liaison montante, donc la cible de brouillage du brouilleur est le drone. Le scénario de brouillage est illustré dans la figure ci-dessous, et certaines hypothèses générales sur les paramètres sont données : le gain de l'antenne papillon de la station de contrôle est de 20 dBi, l'isolation du lobe secondaire est de 15 dB et la puissance de l'émetteur est de 1 W. Le drone est à 20 km de la station au sol et le gain de l'antenne fouet du drone est de 3 dBi.
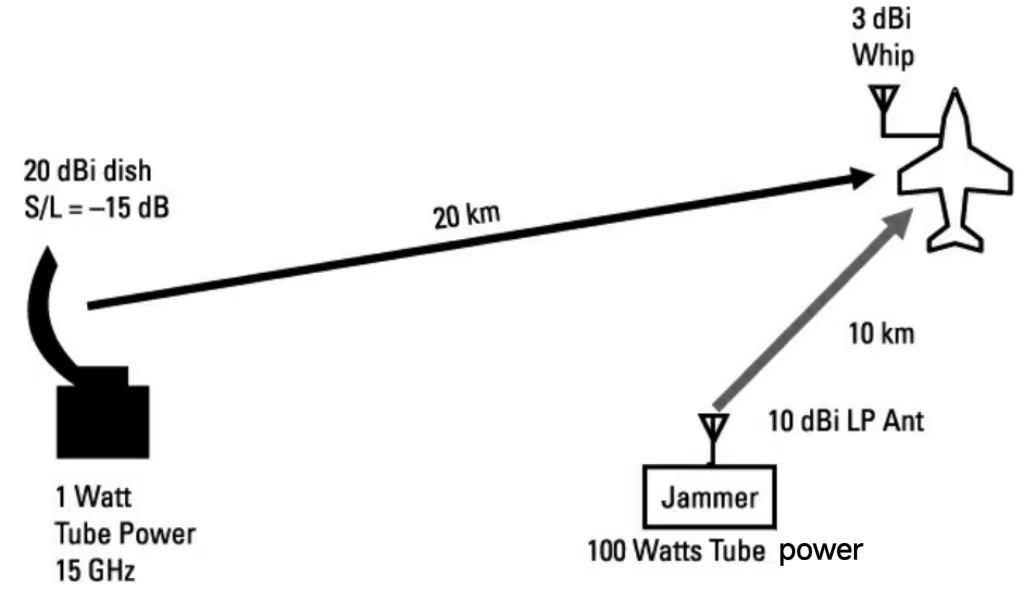
Lorsque le brouilleur est pointé vers le drone, les ERP du signal utile reçu par le récepteur cible :
30dBm+20dB=50dBm ;
Perte de liaison montante :
Ls=32,4+20log(20)+20log(5000)=132,4dB ;
La distance d'interférence est de 10 km du drone et la perte de liaison d'interférence est calculée :
Lj=32,4+20log(10)+20log(5000)=126,4dB ;
EPRj du brouilleur : 50dBm+10dB=60dB ;
Ici, on suppose que l'antenne de réception sur l'UAV est une antenne fouet et que le gain dans la direction de la station au sol et dans la direction du brouilleur est le même, de sorte que le rapport de signal sec J/S(dB)=ERPj-ERPs-Lj+Ls=16dB peut être calculé.
Interférence avec la liaison de données
La liaison de données est également une liaison descendante et la cible de brouillage du brouilleur passe à la station au sol. Étant donné que l'antenne papillon est supposée être adoptée par la station au sol, le signal brouilleur entre généralement par le lobe latéral de son antenne, et la scène de brouillage est la suivante :

A cet instant, le signal utile ERPs=33dBm, la perte de liaison est de 132,4dB ; L'ERPj du brouilleur est de 60dBm, et le gain de la station au sol dans la direction du brouilleur est inférieur de 15dB au gain du lobe principal où se trouve l'UAV, il est donc de 20-15=5dBi, et le rapport du signal sec est calculé :
J/S(dB)=ERPj-Lj+Gj-(ERPs-Ls+Gr)=12dB ;