
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Technologie de tromperie de navigation par drone
La tromperie de navigation ciblant les drones fait généralement référence à l'utilisation de certains moyens techniques pour injecter artificiellement de fausses informations de navigation sur les menaces dans des drones illégaux, ce qui amène le système de navigation par satellite du drone à déterminer incorrectement sa position, et ainsi à effectuer une planification d'itinéraire et un contrôle de vol incorrects, obtenant ainsi dans le but de chasser le drone ou d’atterrir de force à un endroit désigné. Étant donné que les drones grand public utilisent actuellement leSystème mondial de navigation par satellite(GNSS) en tant que principale source d'informations de navigation, la technologie de déception de navigation peut affecter presque tous les drones, en particulier les drones civils, et a une bonne applicabilité. Dans la pratique, l'équipement de guidage de navigation par drone basé au sol émet généralement des pseudo-signaux de navigation qui présentent une certaine similitude avec le signal GNSS réel du drone, obligeant les utilisateurs concernés à recevoir et à calculer ces pseudo-signaux de navigation au niveau du terminal de réception, ce qui permet au drone d'obtenir de faux signaux. informations de position, de vitesse et de temps dans des conditions cachées et incapables de les détecter efficacement. Il convient de souligner que la tromperie de navigation est différente de l'interférence de navigation. La suppression des interférences de navigation utilise généralement des brouilleurs de haute puissance pour transmettre différents types de signaux de suppression, rendant le récepteur cible incapable de recevoir les signaux de navigation normaux et les utilisateurs incapables d'obtenir les résultats de navigation, de positionnement et de synchronisation, ce qui entraîne l'indisponibilité du système de navigation. Étant donné que la tromperie de navigation ne nécessite souvent pas une puissance de transmission trop élevée, offre une bonne dissimulation et peut dans une certaine mesure inciter les utilisateurs concernés à naviguer dans le mauvais sens, cela permet également à la tromperie de navigation d'avoir de bons effets d'application dans la pratique.


Actuellement, il existe deux principales technologies de tromperie de navigation pour les drones :
1) Transmission trompeuse
Comme son nom l'indique, la déception directe consiste à placer un récepteur GNSS autour de la cible à tromper, à stocker et à transmettre le signal GNSS réel à la cible pour obtenir l'effet de tromperie. Généralement, en raison de l'apparition inévitable de retards d'arrivée du signal pendant la réception, le stockage, le traitement et le transfert du signal, les interférences de transfert peuvent être divisées en tromperie de transfert direct et tromperie de transfert retardé en fonction de la présence d'un retard humain dans le retard. Étant donné que le brouillage de déception avant transmet directement le signal réel, cela signifie que tant que le signal actuel peut être reçu, la déception peut être effectuée. Par conséquent, il n'est pas nécessaire de connaître la structure du pseudocode du signal à l'avance, notamment sans comprendre les détails spécifiques de mise en œuvre du code GPS M(Y). Par conséquent, les signaux GPS militaires peuvent être directement trompés. Cependant, en raison du fait que le retard du signal de tromperie transmis atteignant le récepteur est toujours supérieur au retard de l'arrivée du signal réel. En raison de l'impossibilité de modifier la structure du pseudo-code et uniquement la valeur de mesure de la pseudo-distance pendant le processus de déception, la flexibilité de contrôle des interférences de déception vers l'avant simultanées est relativement médiocre, nécessitant souvent des stratégies de contrôle de retard vers l'avant plus complexes, et présentant également certaines limitations sur la lieu de déploiement des dispositifs de transfert. Pour les récepteurs qui ont déjà réalisé un suivi stable des signaux GPS, le brouillage de déception vers l'avant n'est efficace que lorsque le délai entre le signal vers l'avant et le signal direct au centre de phase de l'antenne du récepteur cible est inférieur à une puce en raison de sa phase de pseudo-code. horloge en retard par rapport au signal réel. De plus, des recherches ont montré qu'en raison du fait que les récepteurs GPS reçoivent généralement plusieurs signaux satellite (généralement supérieurs à 10 canaux), il est souvent nécessaire de recevoir et de transmettre plusieurs signaux satellite lors de la tromperie. Cependant, dans la pratique, si une seule station et une seule méthode d'antenne sont utilisées pour le transfert, il est souvent impossible de transmettre simultanément plus de quatre canaux (à l'exclusion de quatre canaux) de signaux satellite, et plusieurs signaux doivent être transmis à une seule station de transfert. Il en résulte souvent un grand nombre de stations de transfert, et les signaux d'usurpation d'identité sont également facilement détectés. Par conséquent, l’utilisation du forward spoofing est souvent limitée en pratique.


(2) Tromperie générative
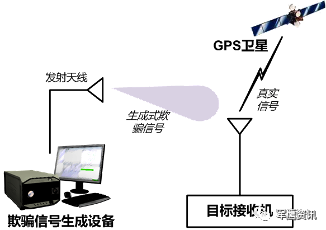
Le principe de base de la tromperie générative est d'utiliser des dispositifs de tromperie pour calculer en temps réel les paramètres nécessaires tels que le retard de phase du code, le Doppler porteur, le message de navigation, etc. du signal GNSS que l'utilisateur doit recevoir à la position attendue prédéterminée de l'utilisateur. . Sur cette base, un faux signal GNSS est généré à ce point et rayonné vers l'objet de tromperie via l'antenne d'émission, masquant le vrai signal GNSS avec l'avantage de puissance du faux signal, lui permettant de suivre et de capturer progressivement la phase de pseudo-code spécifiée et Doppler porteur du signal de tromperie, de sorte que la cible à tromper puisse obtenir des valeurs de mesure de pseudo-portée incorrectes, puis calculer les informations de position incorrectes, atteignant finalement l'objectif de tromperie. Le principe de base de cette méthode est illustré dans la figure suivante :
La tromperie générative nécessite une compréhension complète de la structure des données et des fréquences des signaux GNSS, telles que les structures de pseudo-code, les messages de navigation, etc., ce qui rend difficile la mise en œuvre d'une tromperie générative sur les signaux de code P (Y). Étant donné que le brouillage de tromperie génératif utilise son propre dispositif pour générer des signaux de tromperie et ne repose pas sur le système GNSS, la partie trompeuse peut déterminer librement le message de navigation et le temps de transmission du signal, ce qui permet au signal de tromperie d'atteindre le récepteur soit en retard. ou en avance sur le signal réel. Ainsi, les interférences génératives peuvent tromper le récepteur cible par divers moyens, tels que la modification des valeurs de mesure expérimentales d'arrivée et la falsification des éphémérides/almanachs du satellite. De plus, comme les signaux GNSS sont en réalité des signaux à spectre étalé à séquence directe qui se répètent à une certaine période de code, des recherches ont montré que les signaux de tromperie génératifs peuvent automatiquement faire correspondre la phase du code avec le signal réel au cours de la période de pseudo-code la plus longue (1 ms pour les signaux GPS L1). ), et tirez la boucle de suivi du pseudo-code du récepteur pour suivre le signal de tromperie grâce à une puissance légèrement supérieure au signal réel. Dans le même temps, en raison de la caractéristique de répétition cyclique du pseudo-code dans le signal de tromperie, si la tromperie ne réussit pas dans un cycle de pseudo-code, le signal de tromperie peut également automatiquement mettre en œuvre une traction dans le cycle de pseudo-code suivant jusqu'à ce que le récepteur cible est guidé avec succès. Une fois que le signal de tromperie tire avec succès la boucle de suivi de pseudo-code du récepteur cible, la partie interférente peut contrôler les résultats de synchronisation et de positionnement du récepteur cible en ajustant la phase de pseudo-code du signal de tromperie transmis, atteignant ainsi l'objectif de tromper la cible. destinataire. Par conséquent, cette méthode n’a pas d’exigences élevées quant à l’état actuel du récepteur. Il peut tromper à la fois le récepteur en état de capture et le récepteur en état de suivi en régime permanent. Par conséquent, le caractère pratique de la tromperie générative est souvent plus fort.
En raison de l'application approfondie des systèmes de navigation par satellite dans divers aspects de la vie sociale et des applications militaires, les terminaux de réception de navigation par satellite recevant de faux signaux et obtenant des résultats de synchronisation et de positionnement incorrects peuvent avoir des conséquences catastrophiques. Par conséquent, le nombre de contre-mesures par drones utilisant la technologie de tromperie de navigation est en constante augmentation. Le 4 décembre 2011, les forces de défense aérienne iraniennes ont affirmé avoir utilisé une technologie de déception pour capturer un avion de reconnaissance sans pilote américain « RQ-170 » le long de la frontière orientale du pays. Si ce rapport est vrai, ce sera la première application de la technologie de tromperie de navigation dans les contre-mesures des véhicules aériens sans pilote. Selon les médias, en tant que pays majeur en matière de technologie et d'équipement de guerre électronique, il est fort probable que la Russie ait largement utilisé la technologie de tromperie ciblant le GPS ces dernières années. Selon C4ADS, une organisation américaine à but non lucratif, il y a eu près de 10 000 incidents de tromperie GPS différents en Russie ces dernières années, en particulier lorsque le président russe Poutine visite des zones sensibles, des signaux GPS trompeurs apparaissent autour d'elles. En outre, l'organisation a rapporté qu'à Moscou, notamment près du Kremlin, les touristes ont trouvé à plusieurs reprises leur emplacement désigné comme un aéroport situé à 32 km. Cette approche russe est largement considérée comme une mesure défensive visant à éviter d’être attaquée par les armes guidées par GPS de l’OTAN. L’analyse suggère que l’armée russe a réussi à contrecarrer à plusieurs reprises des attaques en grappe de drones ciblant ses bases militaires en Syrie, probablement grâce à l’utilisation d’une technologie de déception partielle par GPS.